The RoboRing at UCLouvain
The RoboRing project
The RoboRing is an educational and research-development robotic platform at UCLouvain. The platform consists of a dozen Balboa 32U4 balancing robots, capable of self-balancing, navigating, and complete group tasks.
Resources
A dynamical model of the Balboa robot as a pendulum can be found here or at this Master's thesis. For the code, see this repository
For the communication and multi-agent aspects of the platform, see this Master's thesis. For the code, see this repository
Functionalities
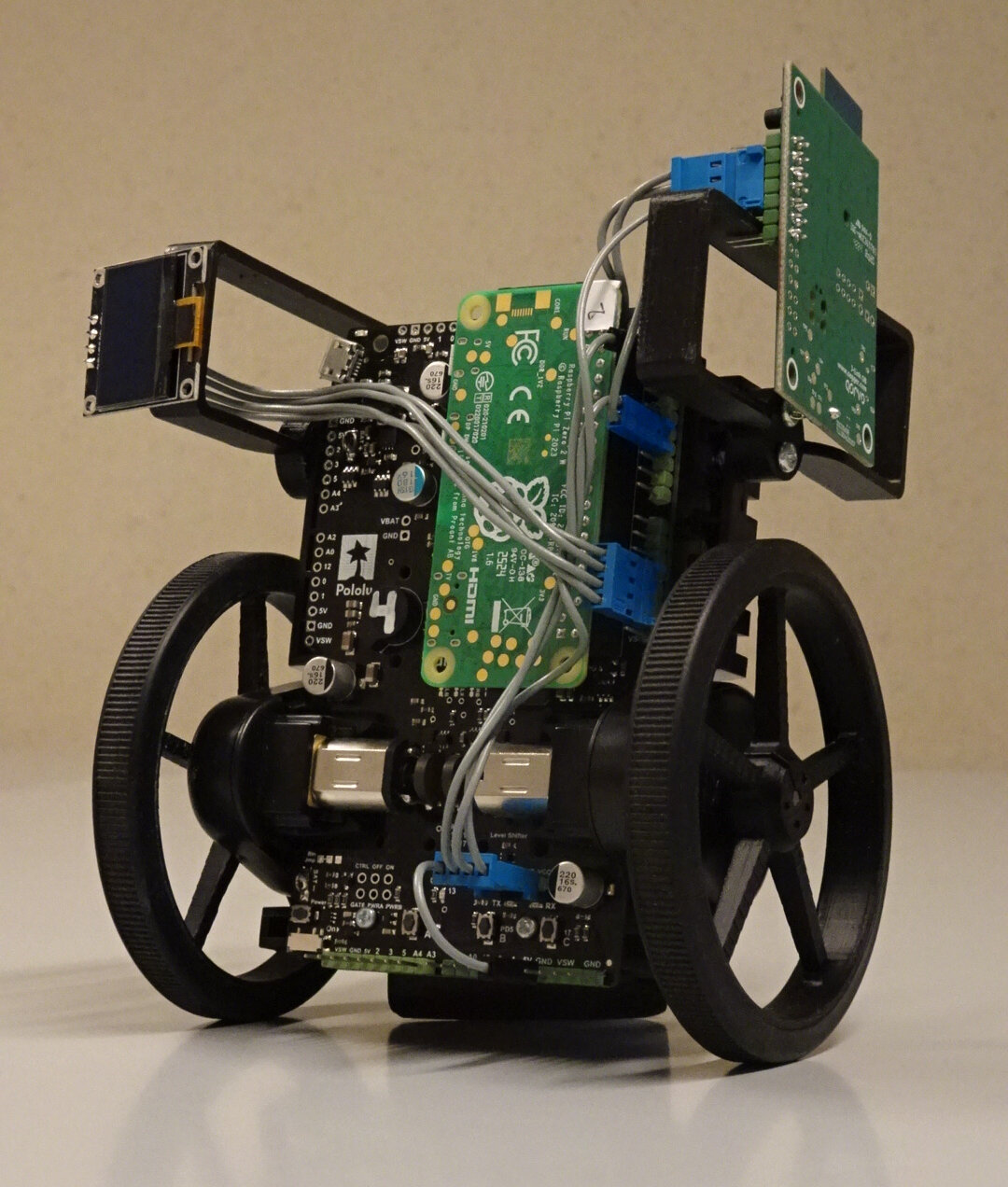 Each robot integrates a Raspberry Pi Zero 2W (center) for processing, a
Decawave DWM1001 (right) for localizartion, and an OLED screen (left)
Each robot integrates a Raspberry Pi Zero 2W (center) for processing, a
Decawave DWM1001 (right) for localizartion, and an OLED screen (left)
 Decawave DWM1001 used as anchor for localization
Decawave DWM1001 used as anchor for localization
Brief description of the available modules
Each agent is based on the Balboa 32U4 self-balancing robot, developed by the company Pololu. It includes differential wheels, encoders, an IMU, magnetometer, and an ATMega32U4 MCU. It offers expansion features such as level shifters, GPIO extenders, etc. This robot serves as the basis for each agent in our swarm.
Each Balboa robot is coupled with a Raspberry Pi, forming an autonomous swarm agent. The Balboa is responsible for low-level operations such as motor control, LED signaling, button handling, and sensor access. In contrast, the Raspberry Pi handles high-level tasks including swarm communication, algorithm execution, and data logging.
The Decawave DWM1001-DEV system is used for localization. Each Decawave onboard module is composed of an UWB antenna, a microprocessor (Nordic nRF52832) and a J-Link allowing us to program the microprocessor.
Acknowledgments

Romain Englebert Ms Student 2024-25

Giuseppe Speciale Ms Student (UniBo) 2024-25

Aurélien Soenen Ms Student 2023-24

François Wielant Lab technician