Research projects
This page contains a list of ongoing projects and research topics my group has worked on.
Green shared multi-modal transportation: a real-time optimization approach
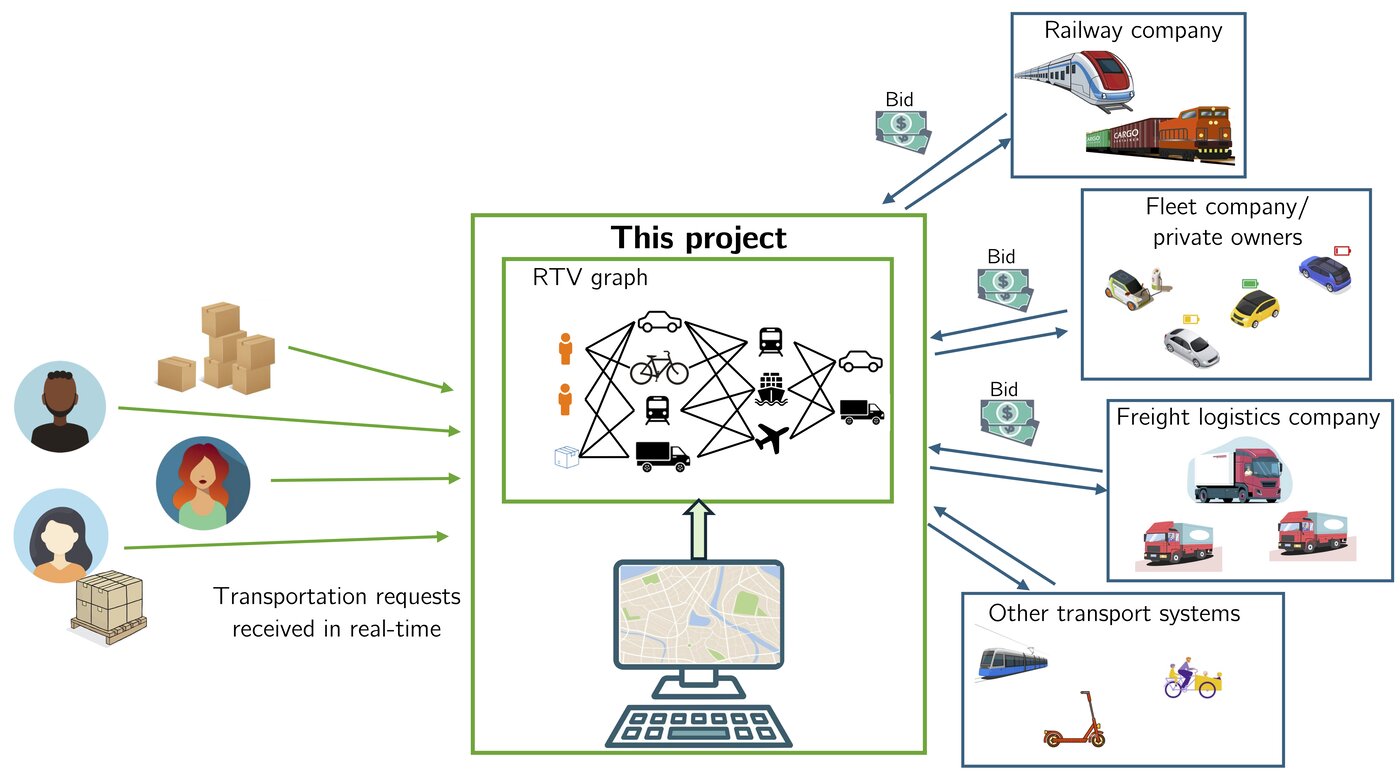
This project aims to transform transportation systems by developing eco-conscious algorithms for route planning while taking advantage of shared and multi-modal mobility. Addressing the significant role of transportation in greenhouse gas emissions, this project targets a new paradigm in how we plan and operate transportation systems, seeking an environment-centric approach where short transit times and quick deliveries are traded in favor of more eco-conscious transportation. Leveraging recent advances in data-driven control and optimization, the proposed research will create algorithms capable of planning routes that minimize the environmental impact of transportation, integrating real-time data for responsive, dynamic adaptation. The project targets a general approach, which will be applicable to both urban transit and logistics. The main outcome will be a demo software platform to plan sustainable multi-modal transportation routes.
Funding acknowledgements:
WEL Research institute
SIDDARTA: Sustainability in data-driven control
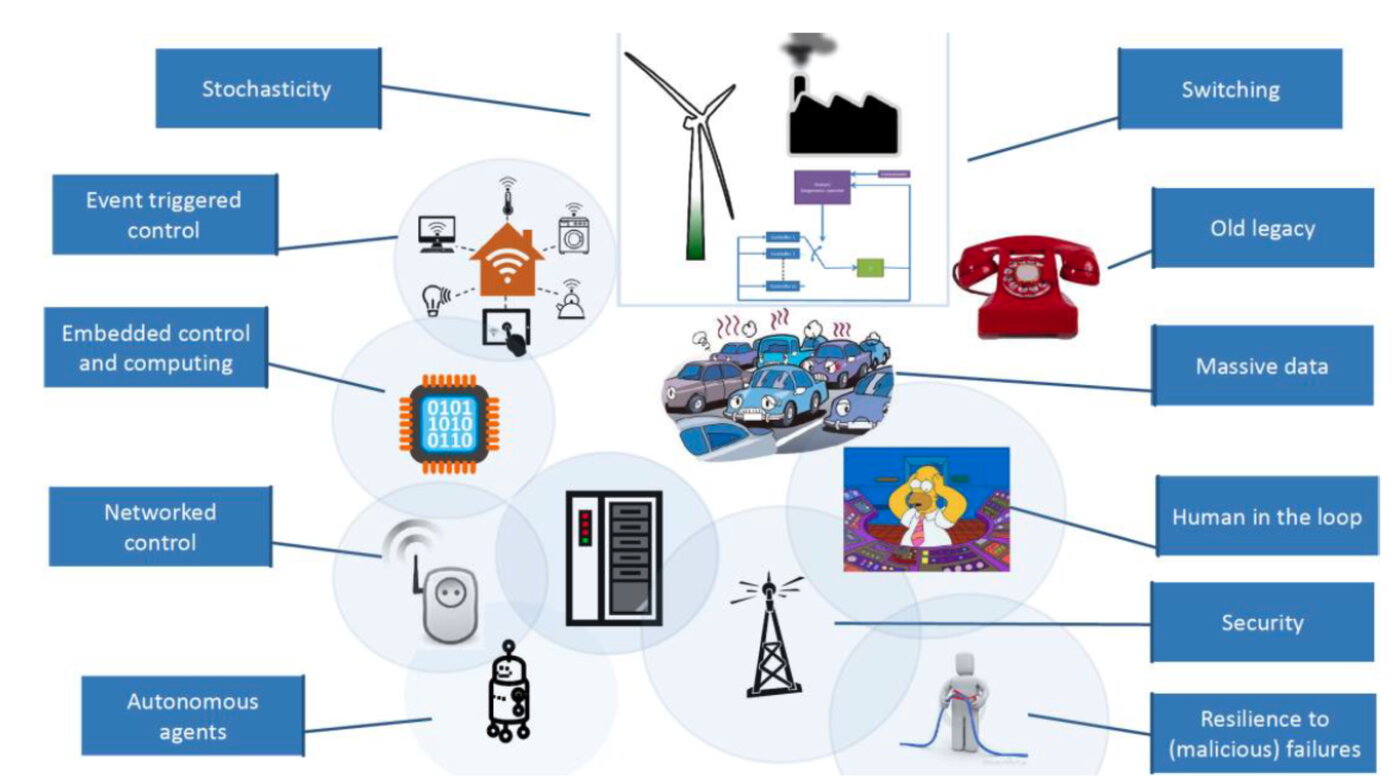
SIDDARTA will introduce a new theoretical approach for data-driven control of complex interconnected systems, aiming at parsimony and sustainability, which are crucial challenges in many modern technological applications. Our new vision prioritizes resource frugality over performance in physical systems, seeking an optimal tradeoff between the two by allowing for uncertainties. In turn, uncertainties are mitigated by handling them across scales in a holistic fashion, finding inspiration from recent research endeavors in control and in statistical physics. Our new algorithms will address the massive paradigm shift towards data-driven control of complex systems, and propose sustainable alternatives to the current trend of evermore resource-voracious methods.
Collaboration with Raphael Jungers, Julien Hendrickx, and Jean-Charles Delvenne
For more information, see the SIDDARTA project website
Funding acknowledgements:
Actions de Recherche Concertées (ARC)
Data-driven and learning-based control

Data-driven control enables the synthesis of feedback controllers directly from historical data generated by physical systems, and thus eludes the need to construct or identify a model for the underlying system to control. Data-driven approaches are especially useful in scenarios where first-principle models are difficult to derive or the identification task may lead to numerically-unreliable models. In these cases, data-driven methods are preferable since controllers can be synthesized directly from data. The goal of this research line is to push forward the available theory on data-driven control by borrowing tools from machine learning. Robotics is a particular application of interest.
For more information, see the RoboRing project website
Funding acknowledgements:
Optimization for dynamical systems
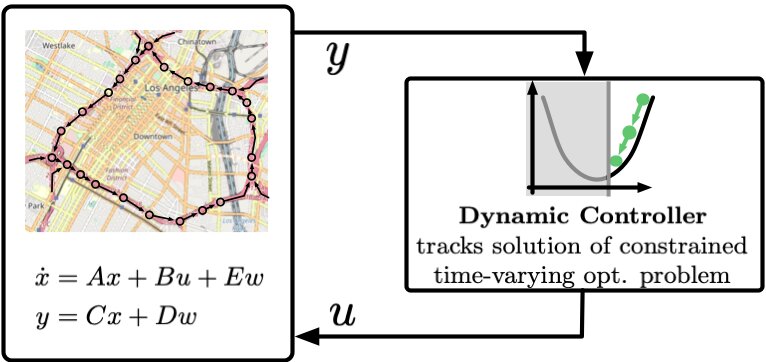
In many control problems, it is desirable to regulate physical systems to optimal operating points and simultaneously recompute these setpoints during runtime accounting for several optimality requirements. To this aim, the goal of this line of research is to develop new control algorithms by drawing inspiration from optimization methods.
Funding acknowledgements:
Optimization of (electrified) transportation
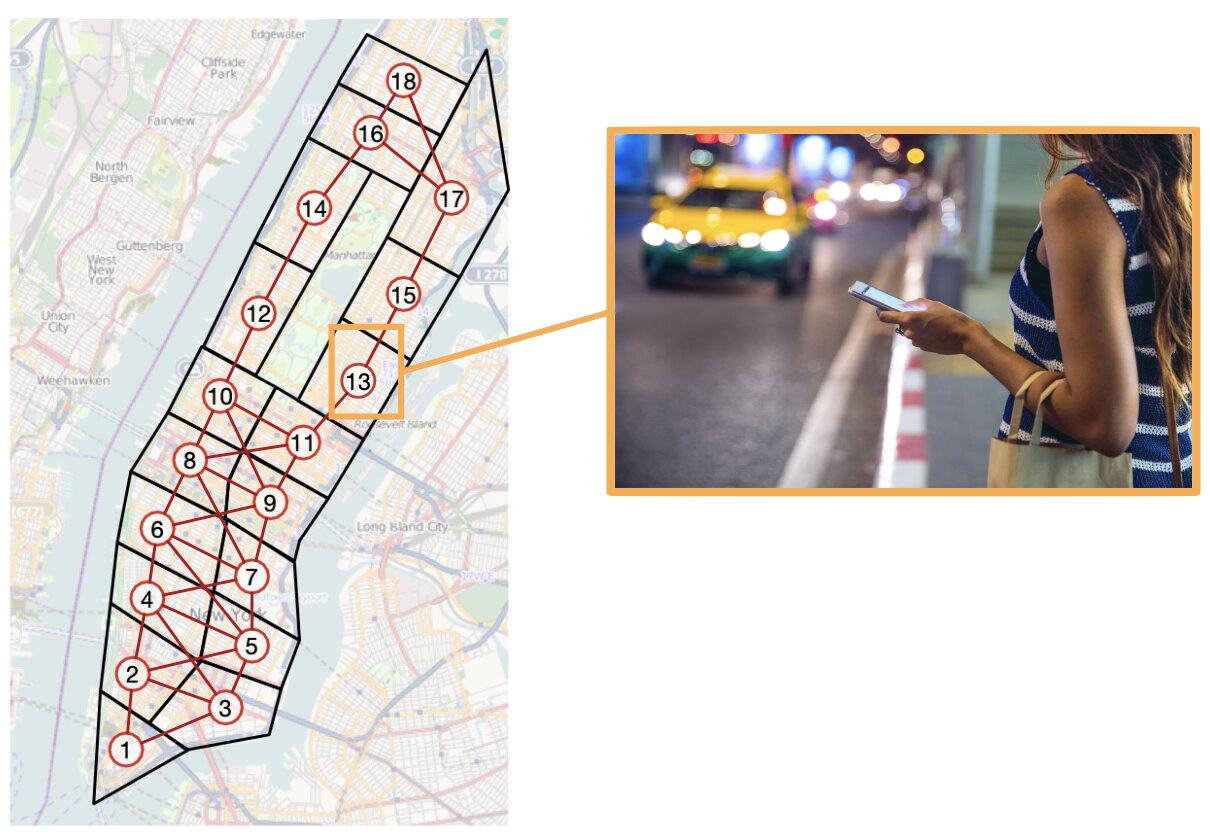
Traffic networks are fundamental components of modern societies, making economic activity possible in any city worldwide. This line of research focuses on the development of new control strategies to enable the seamless integration between future electric grids, electric vehicles, and smart buildings with the ultimate goal of supporting the adoption of renewable resources, reducing energy waste, and overall promoting a sustainable shift towards using independent and renewable energy sources.
Reliable and secure robotic navigation
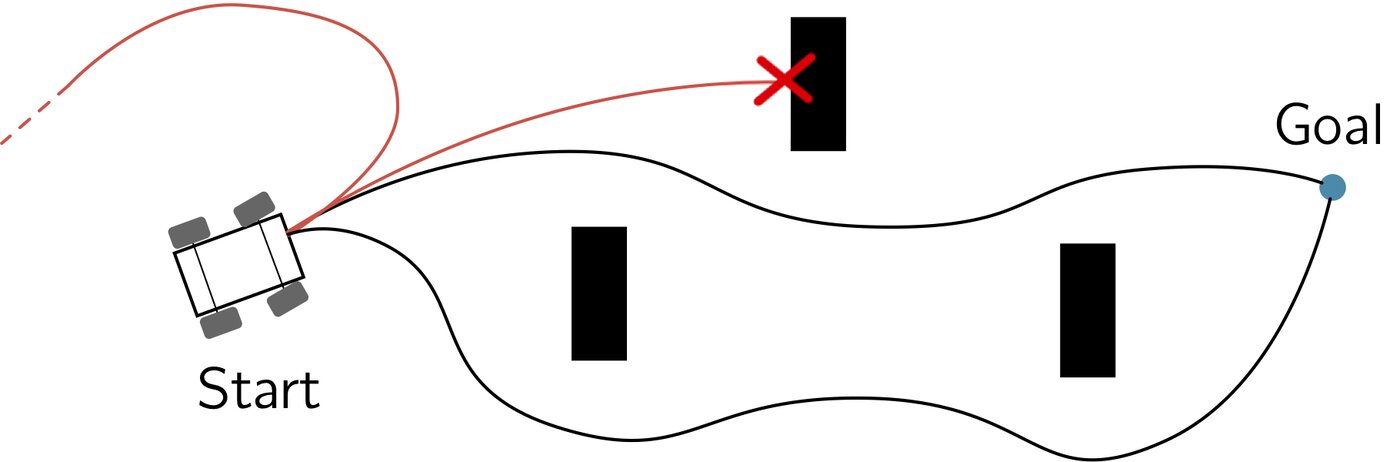
Mobile robots are used in a broad range of operations thanks to their autonomous capabilities, flexibility, and precision. In this line of research, we are concerned with the problem of making robotic navigation secure, by anticipating and preventing malicious attacks targeting robots’ sensors and actuators.
Control of epidemic spread over networks
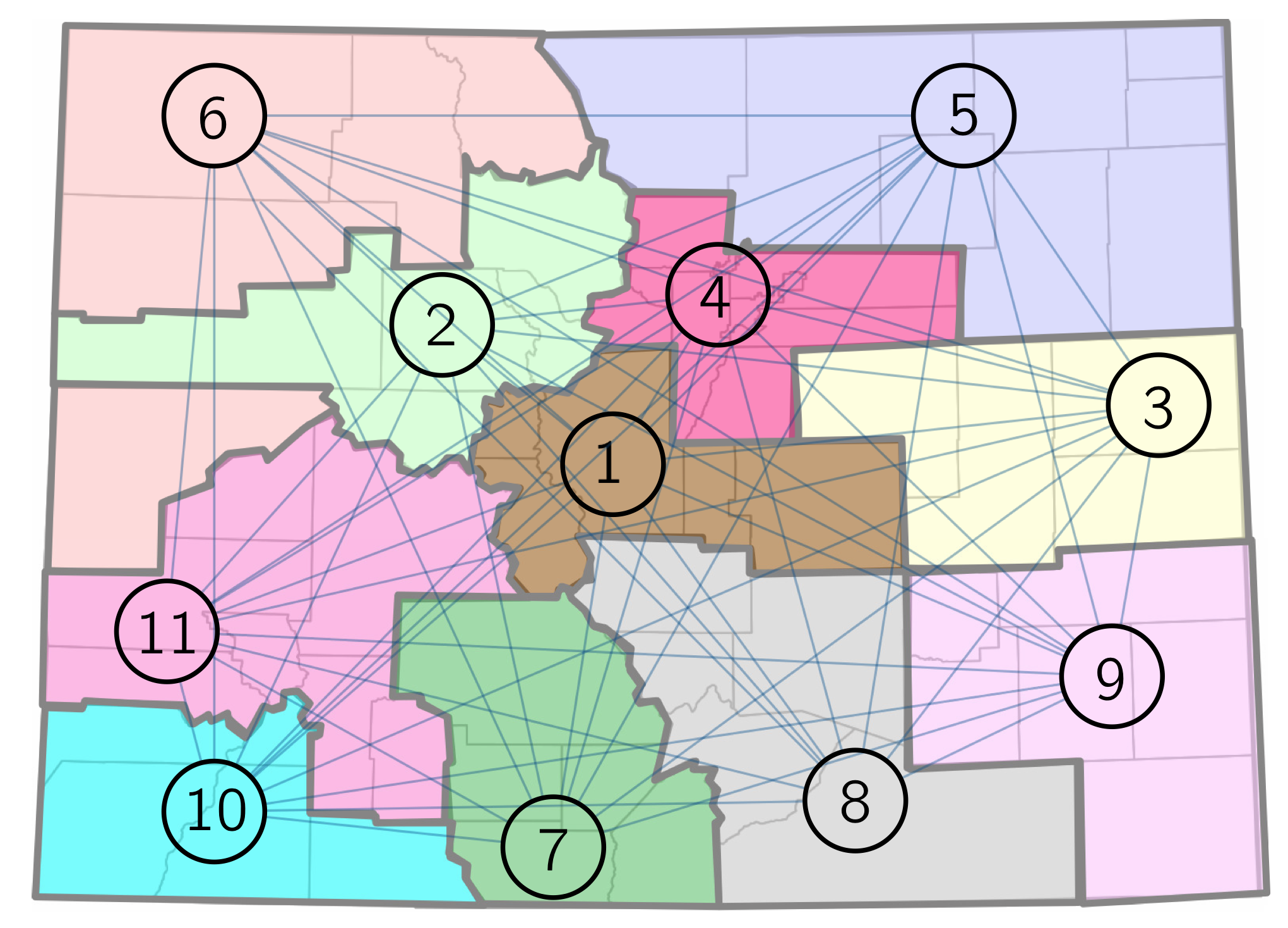
The number of high-threat infectious diseases continues to rise: some of these are new and some others are re-emerging. Control plays an increasingly central role in the containment of epidemic spreads, as several variables such as mask-wearing, business closures, vaccinations, etc. can be controlled by policymakers. To this end, we work on the development of novel control methods for data-driven decision-making that can guide policymakers in the containment of outbreaks.
Funding acknowledgements:
AB Nexus